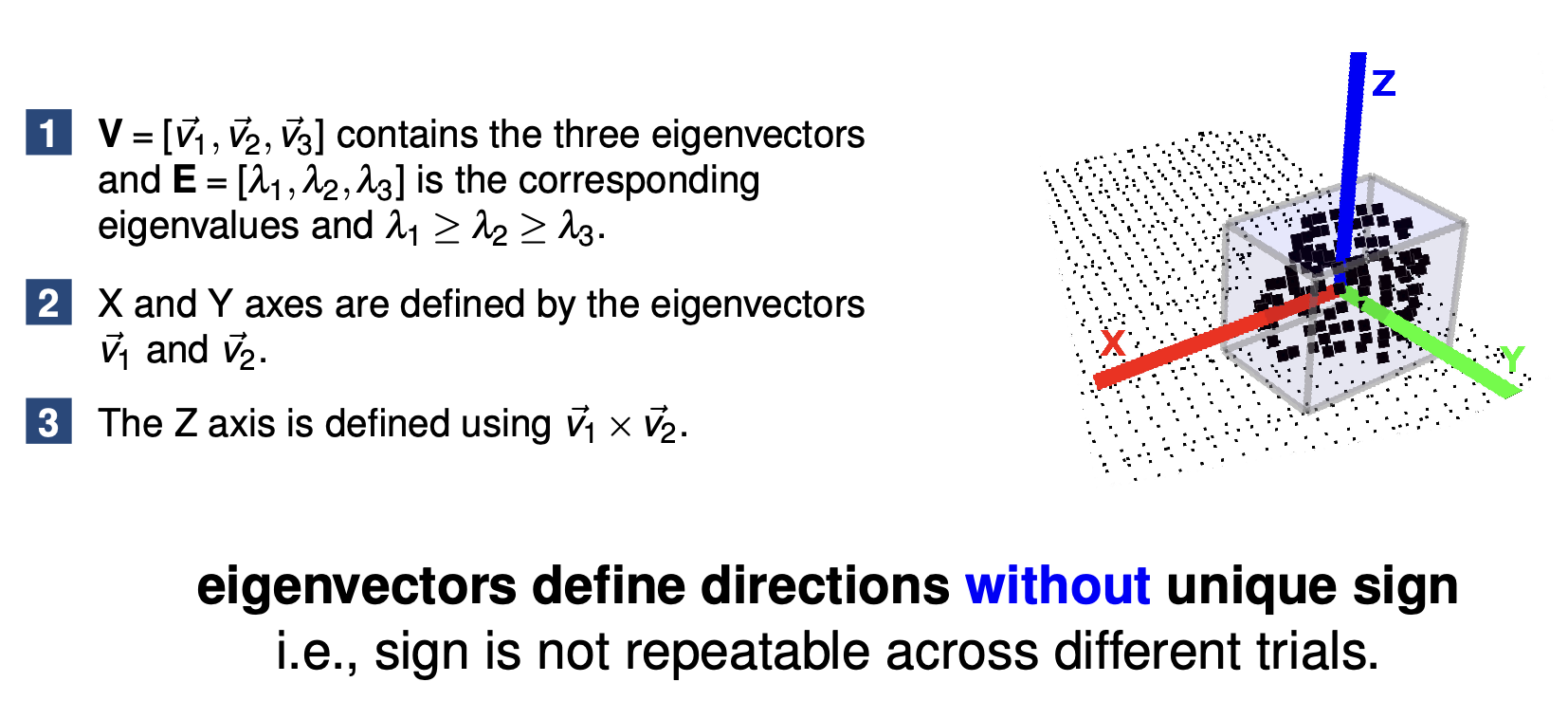
Local Reference Frame Three principal axes of a given object’s point cloud are firstly determined based on eigenvectors analysis (PCA)