Visual Servo System
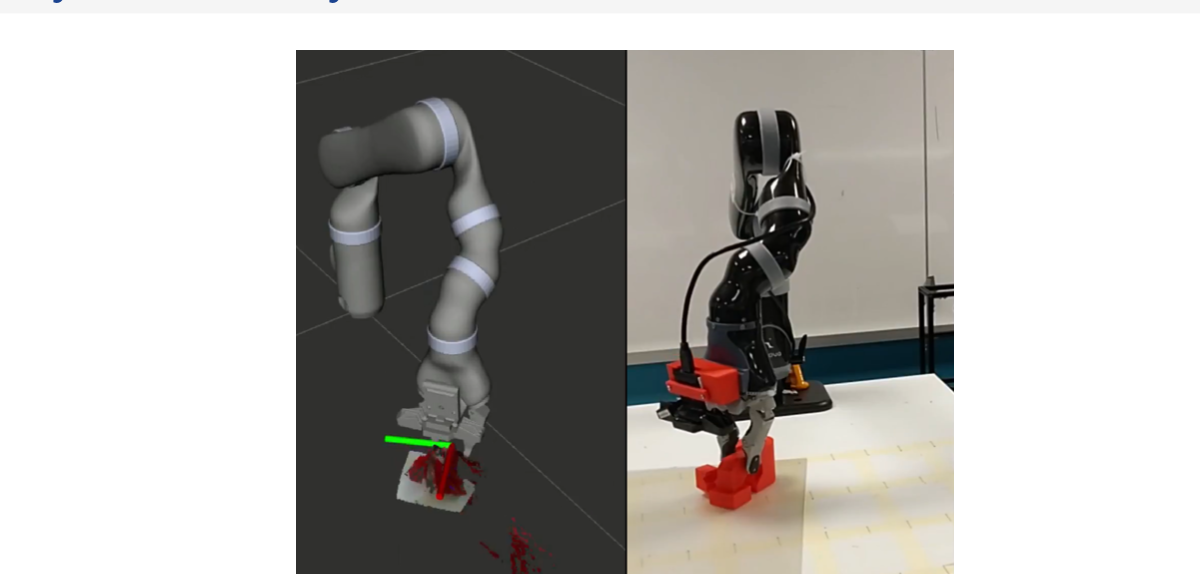
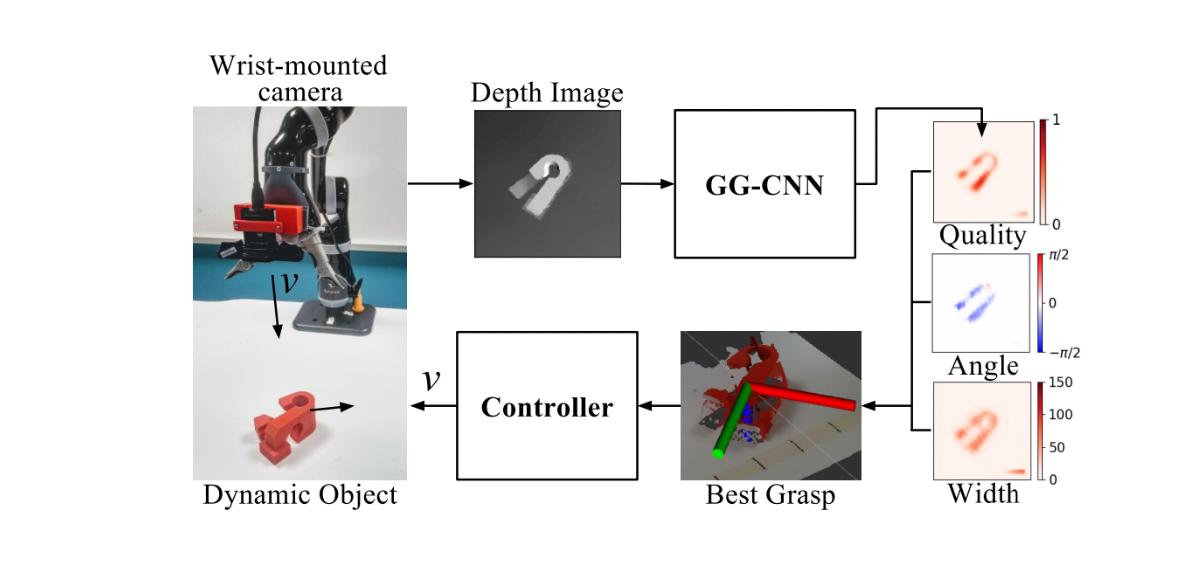
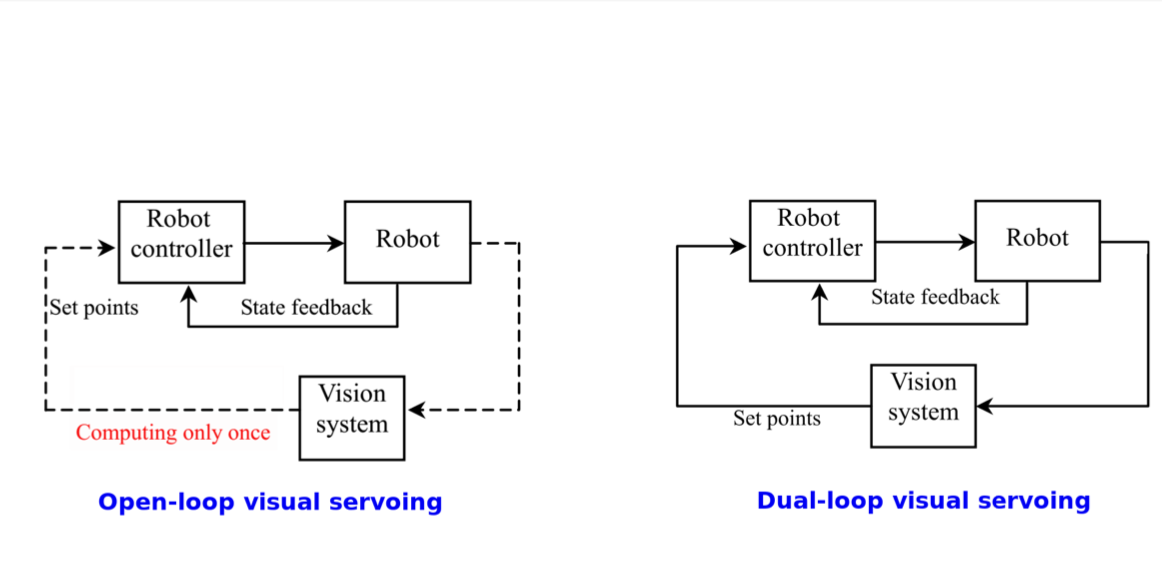
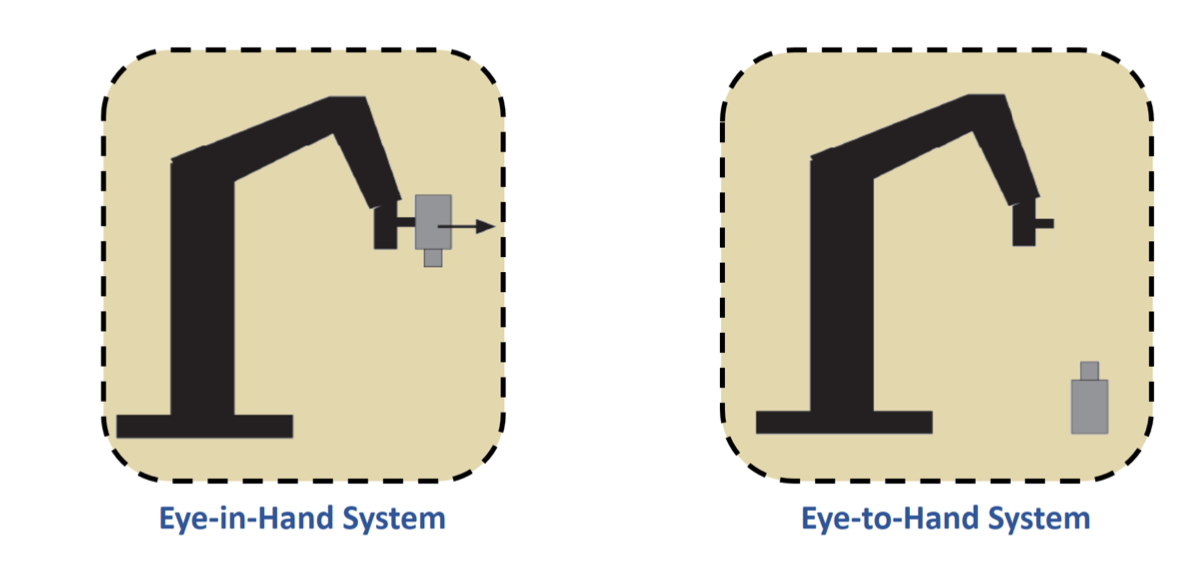
- The task in visual servoing is to use visual information to control the robot’s end-effector relative to a target object
- Chaumette, François, and Seth Hutchinson. “Visual servo control. II. Advanced approaches [Tutorial].” IEEE Robotics & Automation Magazine 14.1 (2007): 109-118.
- Morrison, Douglas, Peter Corke, and Jürgen Leitner. “Closing the loop for robotic grasping: A real-time, generative grasp synthesis approach.” RSS (2018).