Unet Grasping
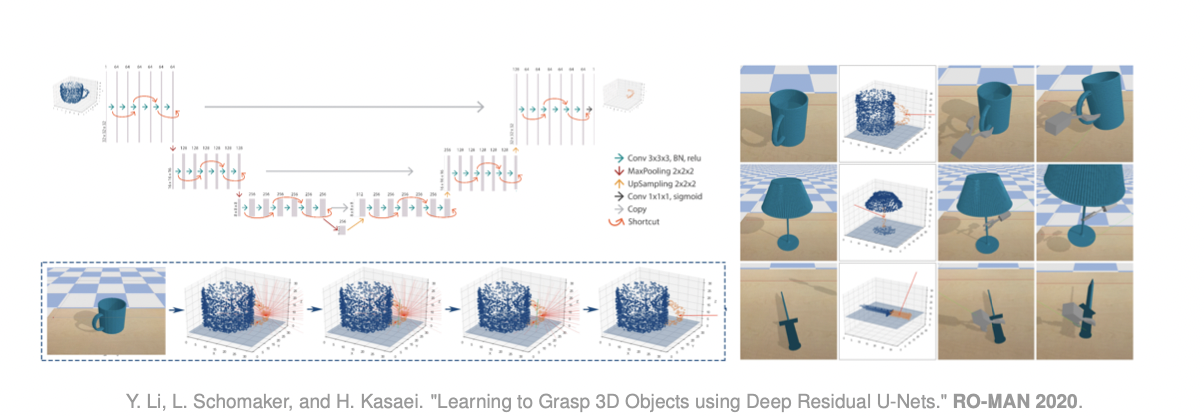
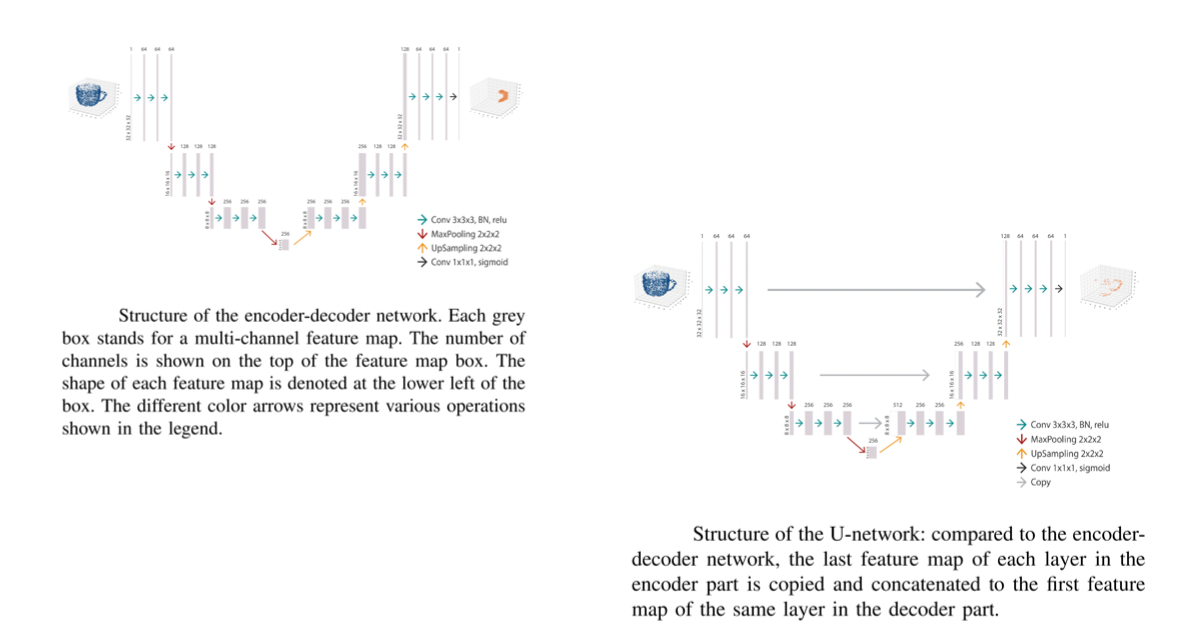
- Y. Li, L. Schomaker, and H. Kasaei. “Learning to Grasp 3D Objects using Deep Residual U-Nets.” RO-MAN 2020.
- Formulate object grasping as a part segmentation problem
- Detect graspable shape primitives
- The Gripper is free to approach objects from arbitrary directions.