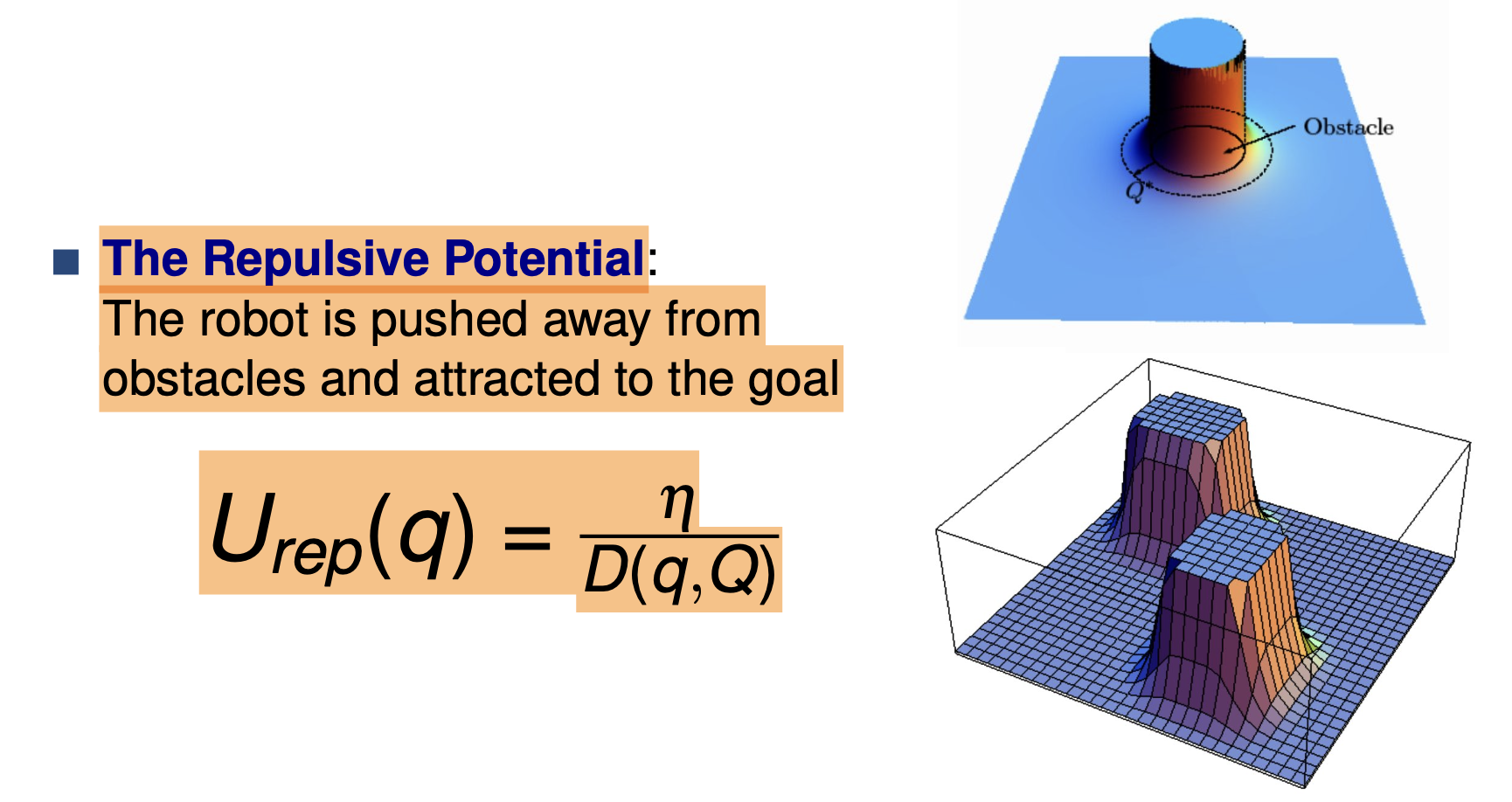
The Repulsive Potential The robot is pushed away from obstacles and attracted to the goal Urep(q)=D(q,Q)η