MVGrasp
- H. Kasaei, et al. “MVGrasp: Real-Time Multi-View 3D Object Grasping in Highly Cluttered Environments.” arXiv preprint arXiv:2103.10997 (2021).
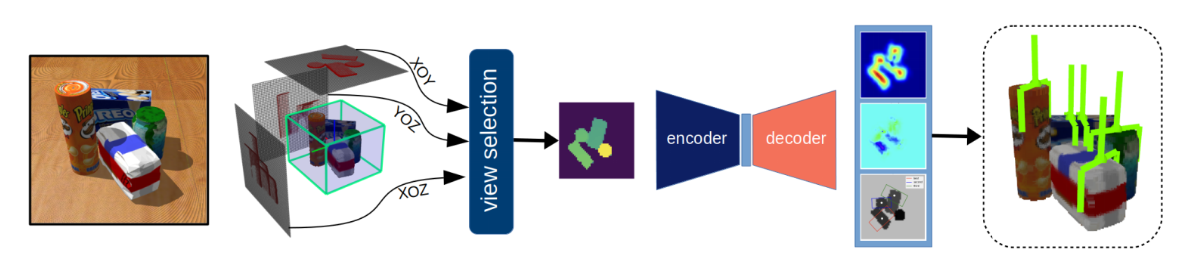
- Render multiple views of objects and use a next best view view selection algorithm Generate pixel-wise grasp configuration for the given object view.
- The Gripper approaches the target object in an arbitrary direction.
- Use a shallow network, and an eye-to-hand camera configuration.
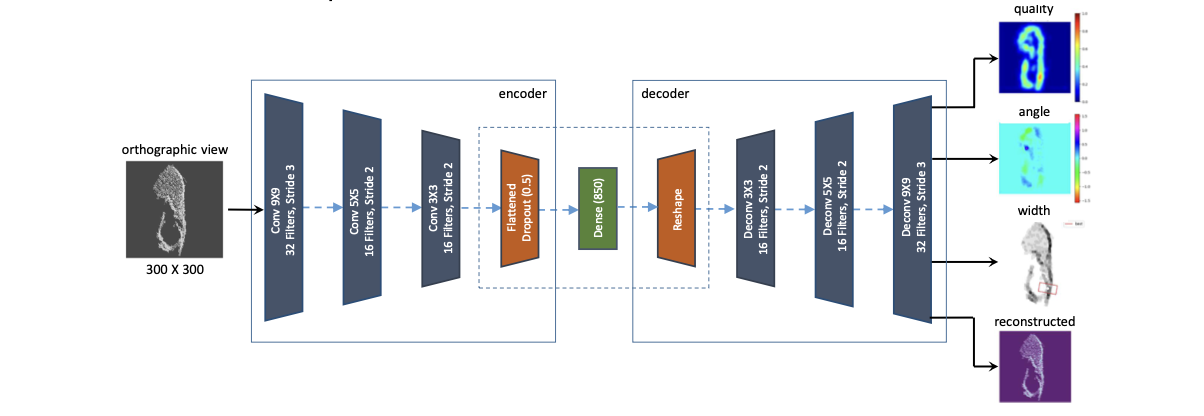
- Mixed autoencoder (CAE + DAE)
- optimizer: RMSprop, learning_rate = 0.001
- metrics: Intersection over Union (IoU) and reconstruction error loss: mean [squared error](squared error.md)
- Which view is suitable?
- Depends on the pose of the target object and other objects
- Most objects are graspable from either top or side → orthographic setup
- View Entropy is used as the metric for selecting the best view