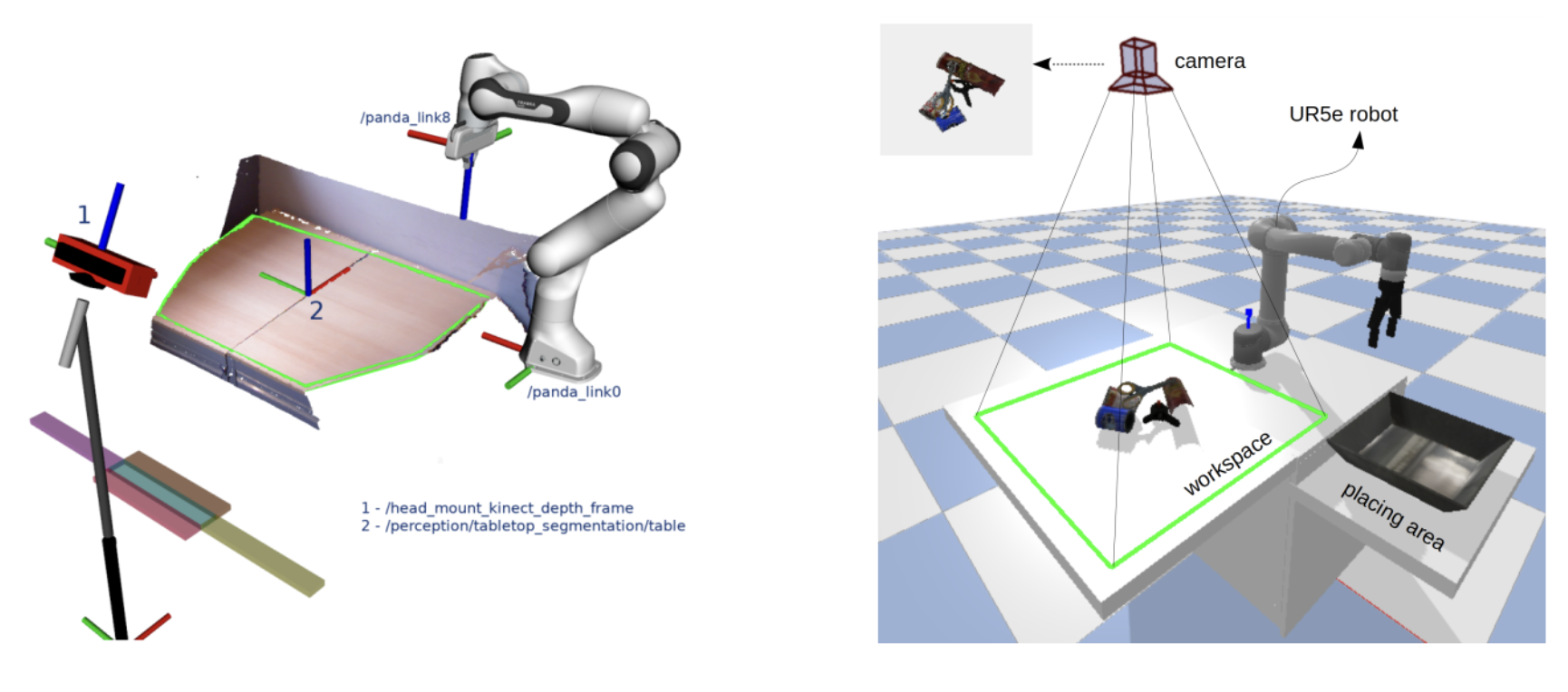
Eye-to-hand System The task in visual servoing is to use visual information to control the robot’s endeffector relative to a target object. provide feedback to the robot controller at each time step