Deconvnets are designed to work similar to convolutional networks but reverse (reversing pooling component, reversing filter component etc.), and they can be trained using an unsupervised approach.
To reconstruct the activation on a specific layer, we are attaching deconv layers to corresponding CNN layers
To examine a reconstruction for a given class c, we have to set all activations except the one responsible for predicting class c to zero.
Then we can propagate through deconvnet layers and pass all the feature maps as inputs to corresponding layers
Propagation through the whole deconvnet gives us a representation of the features from the first layer of the original CNN
This approach causes the saliency map to feature some biases from the first convolutional layer and the representation looks like a localized edge detector
works better when there is a clear distinction in the feature importance rather than similar values for the whole image
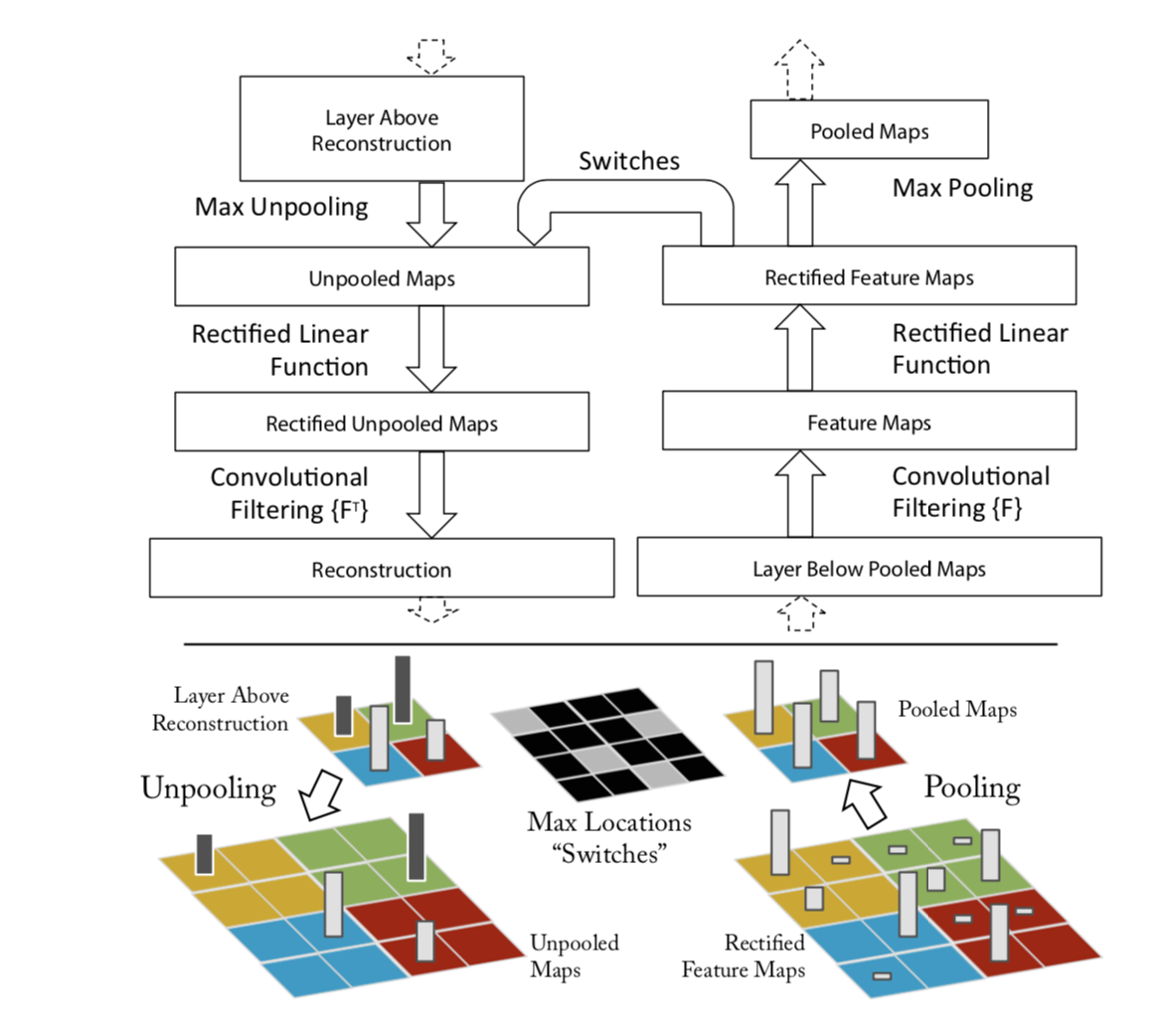
Basically invert operations between input and the chosen layer.
Conv → Deconv
Pool → Unpooling
ReLU → ReLU with negative valyes clamped going backward from the activation space to image space
Pooling is non invertible, but uses a switch module : recover positions of maxima in the forward pass
DeconvNet is a calculation of a backward convolutional network that reuses the weights at each layer from the output layer back to the input image
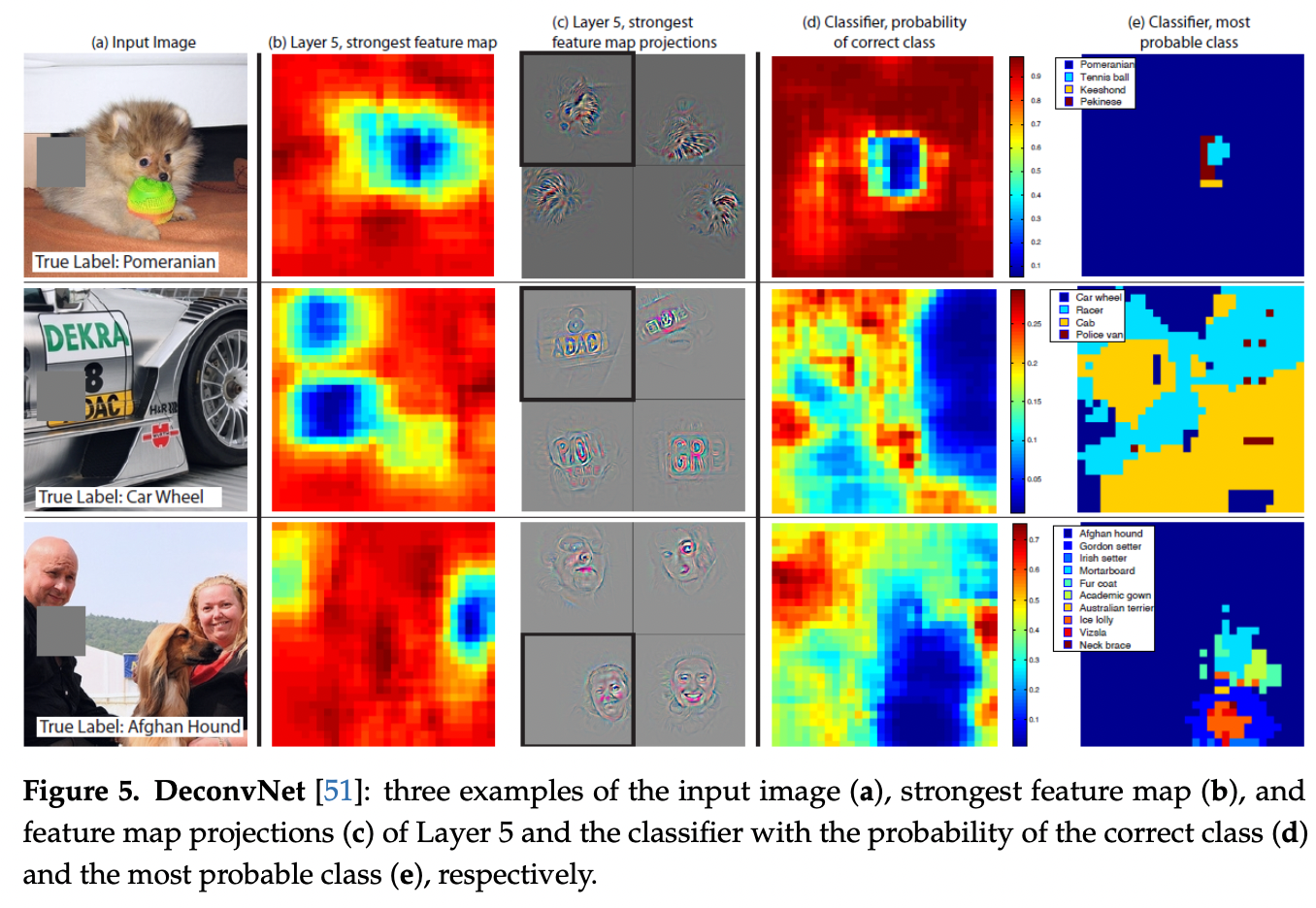
The employed mechanisms are deconvolution and unpooling, which are especially designed for CNNs with convolutions, max-pooling, and Rectified Linear Units (ReLUs). The method makes it possible to create feature maps of an input image that activates certain hidden units most, linked to a particular prediction
With their propagation technique, they identified the most responsible patterns for this output. The patterns are visualized in the input space
DeconvNet is limited to max-pooling layers, but the unpooling uses an approximate inverse
Filtering
Filtering in the original CNN computes feature maps using learned filters. Reversing that operation requires the use of a transposed version of the same filters. Those transposed filters are then applied to the Rectified Unpooled Maps.
Rectification
same ReLU non-linearity
simply just rectifying the values and propagate only non-negative ones to the filtering layer
Unpooling
The original max-pooling operation is non-invertible, but this approach uses additional variables called switch variables, which are responsible for remembering the locations of the maxima for each pooling region.