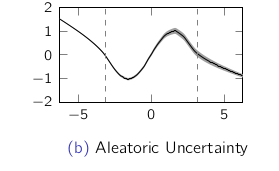
Aleatoric Uncertainty part of the data Sensor noise etc Simplest noise : additive noise f(x)=x3+ϵ ϵ∼N(0,σ2) Homoscedatic Heteroscedatic